本文在联想到 Y 因子法测量系统噪声温度和天线测量天体等效噪声温度的基础上,通过和 chatgpt 对话加上一些修改得到,包括理论和实践;在测量物体噪声温度时虽然以测量天体为实践,但是整套测量流程可扩展于各种物体,比如人体在无线电波段的等效噪声温度
# 一、Y 因子法测量系统噪声温度
Y 因子法用于测量噪声温度(Noise Temperature),这是射频系统、微波系统中衡量放大器或接收器噪声性能的常用方法。其核心原理基于两个不同温度下的噪声功率测量,并通过这两个测量值的比值(Y 因子)推导出系统的噪声温度。
# 基本原理
- 噪声温度 描述的是等效噪声功率对应的温度,用于表征接收器、放大器的噪声贡献。
- Y 因子法通过测量两种已知输入噪声源温度下的输出功率比,来计算出接收器的噪声温度。
# 系统的总输出噪声功率
根据噪声传递的基本原理,系统的总噪声功率可以表达为:
其中:
- 是系统输出的噪声功率。
- 是系统的增益。
- 是玻尔兹曼常数。
- 是系统的总噪声温度,包括输入噪声源温度和系统本身的噪声温度。
- 是系统的带宽。
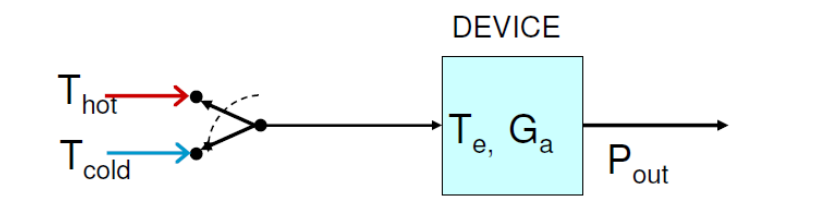
# 两种噪声源温度下的测量
假设我们使用两种已知的噪声源温度进行测量:
- 噪声源温度 (热状态)。
- 噪声源温度 (冷状态)。
对于这两种状态,系统的总输出噪声功率分别为:
其中:
- 是待测系统的噪声温度。
# Y 因子
Y 因子是两种不同温度下输出噪声功率的比值:
代入上面的公式,得到:
简化后为:
# 噪声温度的推导
根据 Y 因子的定义,可以解出噪声温度 :
这个公式就是通过 Y 因子法测量系统噪声温度的结果。
# 实验步骤
- 使用已知的噪声源温度 和 进行两次测量,记录输出噪声功率 和 。
- 计算 Y 因子: 。
- 使用推导公式计算系统的噪声温度 。
# 注意事项
- 噪声源的温度 和 需要是已知且稳定的。
- 系统增益 在两个测量过程中保持不变。
通过这种方法,可以精确地测量系统的噪声温度,从而评估其噪声性能。
# 二、天线测量天体等效噪声温度
使用热源和冷源定标天线来测量天体温度的过程与 Y 因子法非常相似,本质上也是基于比较不同温度下的噪声功率,来推导出天体的温度。两者都依赖于已知的参照温度来定标未知温度的信号。
# 基本原理对比
Y 因子法是通过测量在已知噪声源温度(热源和冷源)下接收器的输出功率,从而计算出接收器的噪声温度。而在天文学中的定标法也是通过已知的参照源温度,推导出目标天体的等效噪声温度或亮度温度。
- 热源和冷源:在天线测量天体温度时,热源和冷源通常是两个已知温度的黑体辐射源。常见的冷源是液氮(约 77K),而热源可能是环境温度的黑体或天线指向天空的背景辐射(约 300K)。
- 天体温度:通过将天线指向天体来测量其接收功率,并与已知的热源和冷源对比,确定天体的等效亮度温度或噪声温度。
# 测量步骤
- 热源测量:将天线指向已知温度的热源,记录系统输出的功率 。
- 冷源测量:将天线指向已知温度的冷源,记录系统输出的功率 。
- 天体测量:将天线指向目标天体,记录系统输出的功率 。
假设系统的增益 保持不变,则系统输出的功率可以表示为:
其中:
- 是系统的噪声温度;
- 是噪声源的温度(热源、冷源或天体);
- 是系统的带宽。
# 推导天体温度
将热源、冷源和天体的功率关系写出来:
其中 是待测天体的温度。
通过热源和冷源的测量,可以定标系统的增益和噪声温度。使用这两个方程可以计算系统的等效增益和噪声温度。接下来,通过天体的功率测量,可以推导出天体的等效温度。
将上面三个公式联立,可以解出 :
# 类似点和不同点
-
类似点:两种方法都依赖于通过比较已知温度的参照源来推导未知温度。无论是天体温度的测量还是系统噪声温度的测量,关键都是通过不同温度下的输出功率来定标系统。
-
不同点:Y 因子法通常用于测量接收器或放大器的噪声温度,而在天体温度测量中,我们关注的是天线指向目标天体时接收到的辐射强度,从而推导出天体的亮度温度或等效噪声温度。Y 因子法即求系统噪声温度,求解两个方程,而天体等效噪声温度则在求解系统噪声温度两式的基础上再求解一式。
# 结论
因此,使用热源和冷源定标天线测量天体温度的过程,与 Y 因子法在思路上相似。它们都基于已知温度源的输出功率比,来推导未知的温度值。通过这些测量,我们可以估算出系统噪声、天体辐射等各种物理量,帮助我们更好地理解天体的性质和接收系统的性能。
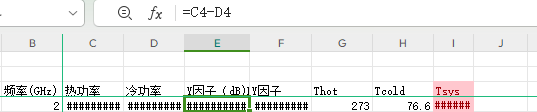
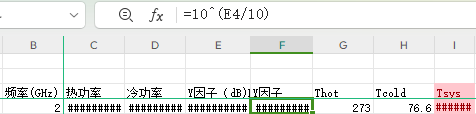
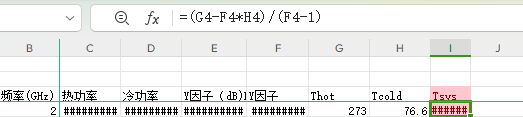
# 三、系统噪声温度计算表格
输出数据为 excel 表格,方便计算和绘图
# 四、天线测量天体的等效噪声温度实践
时间地点: 2024.5.11 下午 6 点左右于上海
目标:中性氢原子在 1420MHz 发出的电磁波,不过此时银河快落下去了,观测时接近地面,所以底噪较高
设备:天线连接低噪放,然后连接 rtl-sdr 接收机;通过 USB 扩展坞给低噪放供电,同时传输数据
软件:GNURadio 运行在 Ubuntu 虚拟机上,rtl-sdr 插到 windows 上再被虚拟机识别;同时用 Sdrsharp 软件做对比


# GNURadio 处理数据
GNURadio 的观测数据如下,可以明显看出底噪较为波动,无法清楚地看出哪个是要观测的信号;可能因为环境不太好,或者 rtl-sdr 接收机本身的底噪就是不平坦的,目前的 GNURadio 程序也没法扣底噪,导致定标时出现问题。
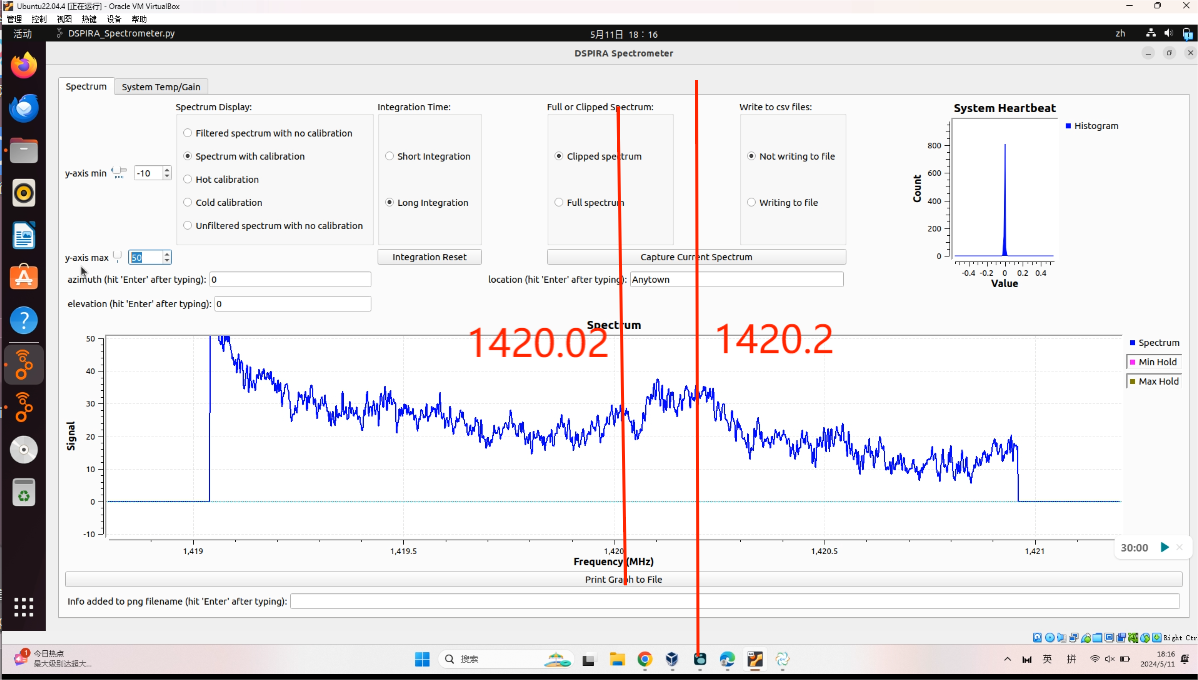
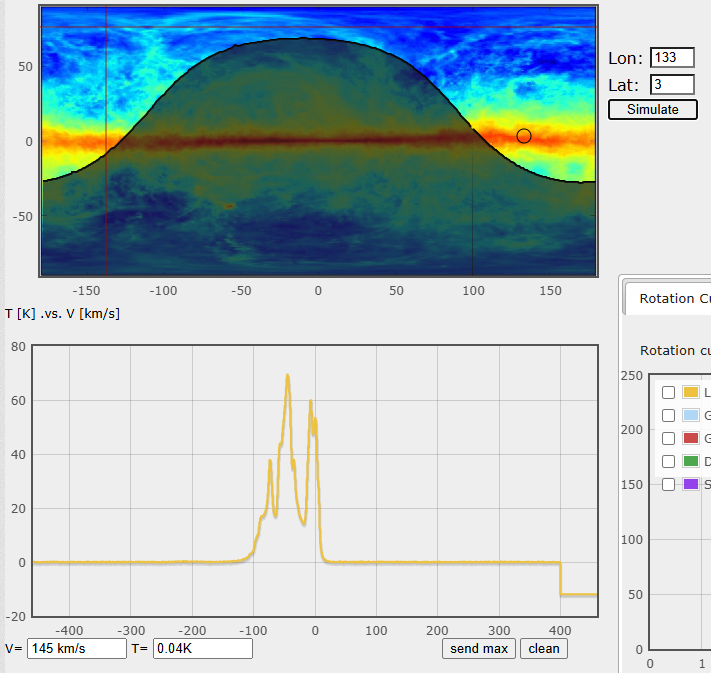
不过仍可以看出 1420MHz 附近的等效噪声温度在 30 到 40K 之间,当时大概指向御夫座附近,银经约为 133°,银维设为 3°,查询 EUHOU radio telescope simulator 可以得到其频谱(网站上把横坐标的频率利用多普勒公式转为了氢原子相对于观测者的速度,这种转换是线性的,本质上仍然是频率),可见数量级上确实能够对上,说明整体还是没有问题的。
定标时分别对着室内的地(热源)和对着小区楼中间的天空(冷源),关于如何利用冷热源定标,可参考 How to Calibrate the Horn Telescope 、 GNURadio Software for the 21 cm Neutral-Hydrogen Line
定标流程:
- 将望远镜指向地面。上面的视频演示了如何完成此操作。
- 将 Spectrum Display(频谱显示)切换到 Hot Calibration(热校准)。
- 选择 Time integration 到 Long integration。
- 观察显示的频谱。您可能需要更改 ymax 值,以便所有信号在图表上都可见。等待图表稳定显示。然后将 Spectrum Display 切换到 Cold Calibration。在显示的光谱更改为 COLD CALIBRATION 之前,请勿移动望远镜。
- 将显示切换到 Cold Calibration(冷校准),并将积分切换到 Short Integration(短积分)。
- 将望远镜对准开阔的天空。继续重定向它,直到你在 1420.4 MHz 附近找到一块没有显示任何氢峰的天空。执行此操作后,切换到 Long Integration。
- 等待图表稳定显示。然后将 Spectrum Display 切换到 Spectrum with Calibration。在显示的光谱更改为带校准的光谱之前,请勿移动望远镜。
- 光谱仪现在已经校准好了,图表现在应该只显示来自星系的信号。
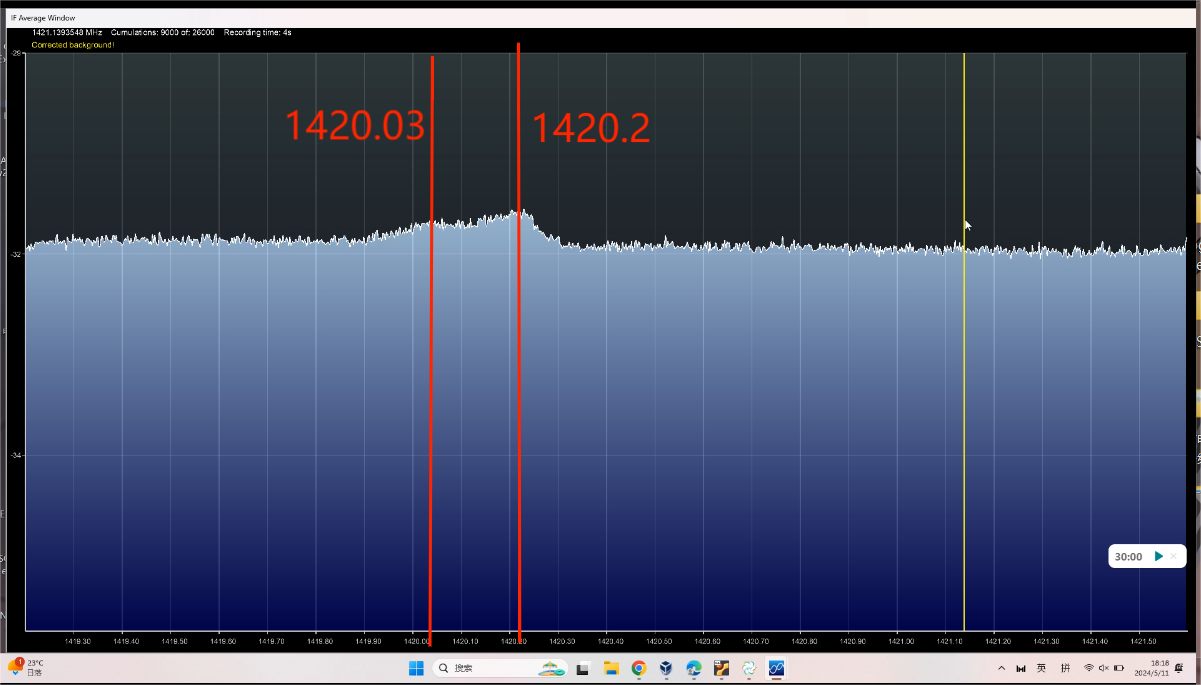
# Sdrsharp 处理数据
利用 Sdrsharp 观测时也进行了校准,就是利用 IF Average 扣除了底噪背景,可以明显看到氢谱线的峰,然而 IF Average 没法进行温度定标,所以只能显示出信号的电平。